問題:動滑車を介した運動
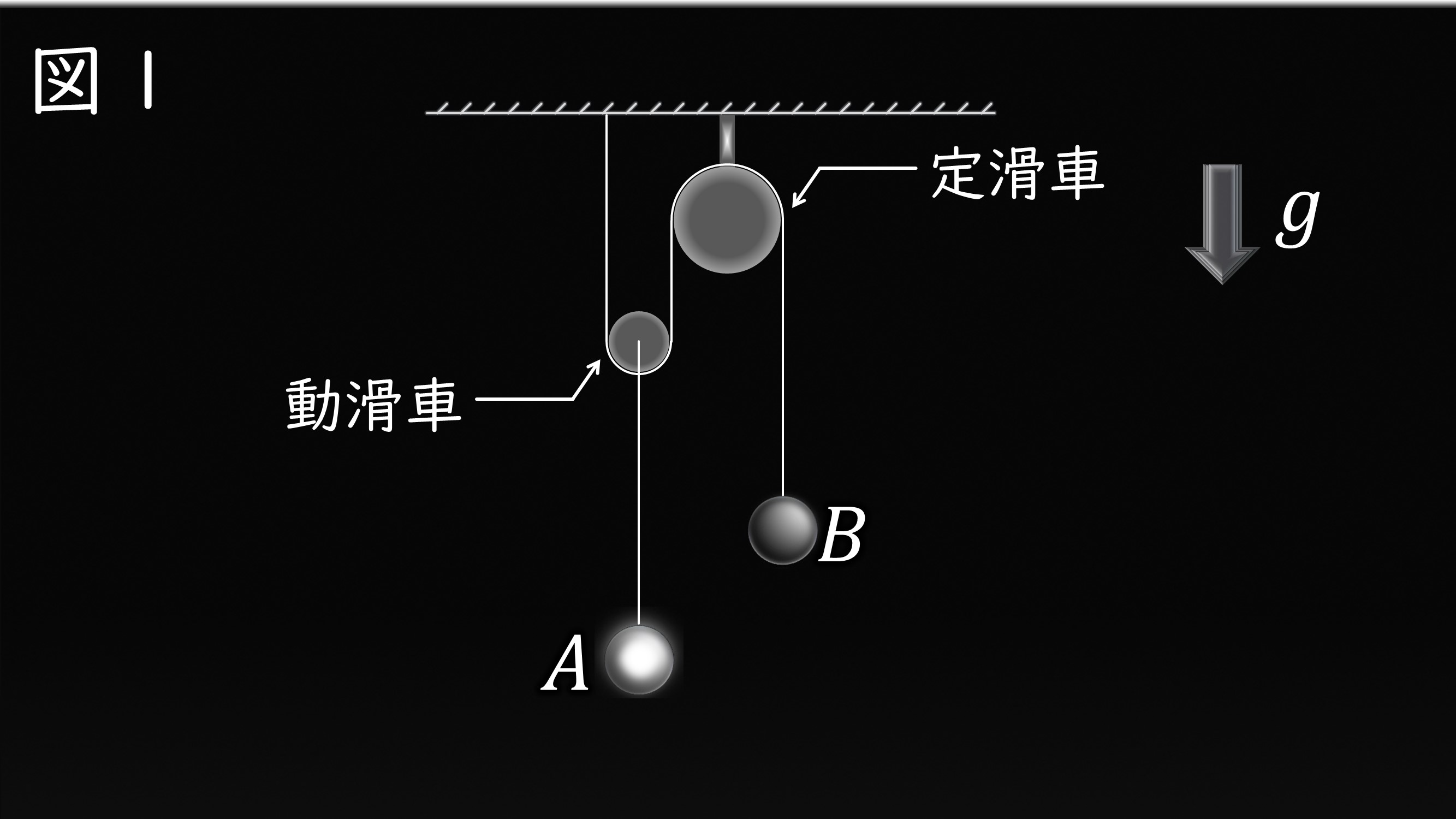

図1に示すように質量\(m_A\)の物体Aと質量\(m_B\)の物体Bを
糸や滑車を介して吊るしたところ、物体Aが鉛直上向きに運動した。
糸および滑車の質量は無視できるものとし、
重力加速度の大きさを\(g\)として以下の問いに答えよ。
問1 物体Aに繋げられた糸の張力と物体Bに繋げられた糸の張力の関係式を求めよ。
問2 物体Aの加速度の大きさを求めよ。
問3 それぞれの糸の張力の大きさを求めよ。
〔解き方〕
〔公式〕
◆運動方程式
・物体Aの\(y\)軸方向について
\(m \cdot a = F \cdots (1)\)
・物体Bの\(y\)軸方向について
\(m \cdot a = F \cdots (2)\)
・動滑車の\(y\)軸方向について
\(m \cdot a = F \cdots (3)\)
今回の問題では、上式のような運動方程式を立てて問題を解きます。以下のステップに従って立式しましょう。
ステップ1:力の図示
物体Aに働く力を図2に、物体Bに働く力を図3に示します。
また動滑車に働く力を図4に示します。
これらの力を漏れなく列挙するには、
①遠隔力…離れていても働く力
②接触力…接しているときに働く力
に分けて図示するとよいでしょう。これまでに学習した遠隔力は重力だけなので、
物体A, Bそれぞれに対して重力を素直に図示します。
滑車は問題文で”軽い”とされているので、滑車の重力は考えません。
次に接触力ですが、これまでに学習した接触力には張力や弾性力など様々あります。
こうした接触力は、対象物体が他の何かと接していたら働くと考えます。
今回、物体Aは糸と接しているので、張力\(T_1\)が働くと考えます(図2)。
同様に物体Bも糸と接しているので張力が働きますが、
これは物体Aに繋げられた糸とは違うものなので、
張力\(T_2\)という別の文字で表わしましょう(図3)。
また、動滑車は張力\(T_1\)の働く糸や張力\(T_2\)の働く糸と接しているので、
これらの張力が働くと考えま(図4)。
ステップ2:軸を定める
運動方程式\(ma=F\)には、”加速度” や ”力” が含まれますが、これはベクトル量なので大きさと向きをもちます。 そのため軸を定めて、軸と同方向なら正、軸と逆方向なら負として向きを取り扱う必要があります。 今回は図5のように鉛直方向に\(y\)軸を定めます。
ステップ3:立式する
≪物体Aについて≫
図6に示すような力で鉛直上向きに加速度\(a\)で運動しているとして式(1)が立式できます。
≪動滑車について≫
図7に示すような力で物体Aと同じ運動をするので加速度は同じく\(a\)と表わせて式(3)が立式できます。
≪物体Bについて≫
図8に示すような力で鉛直下向きに運動します。この運動の加速度について考えてみましょう。
図8の左枠内に示すように、動滑車が\(\Delta x\)だけ上昇したときに動滑車の左右それぞれに\(\Delta x\)の糸のたるみが生じます(緑実線)。
物体Bはこのたるみを解消するだけ落下するはずなので、動滑車の2倍の加速度\(2a\)で運動すると分かり、式(2)が立式できます。
ステップ4:連立して解く
条件代入後の式(1)~(4)を用いて未知数を求めます。ここは、数学的に考えて解けばokです。
{kind=link}
〔解答と解説〕
問1
答え:\(T_1 = 2T_2\)
[解き方]の条件代入後の式(1)~(3)の中から必要なものを使って解きましょう。
式(3)より
\(
\begin{align*}
0 \cdot a &= 2T_2 – T_1 \\
T_1 &= 2T_2 \cdots (3′)\\
\end{align*}
\)
問2
答え:\(\frac{- m_A + 2 m_B}{m_A + 4 m_B} g\)
[解き方]の条件代入後の式(1)~(3)の中から必要なものを使って解きましょう。
まず、式(1)より
\(
\begin{align*}
m_A \cdot a &= T_1 – m_A\cdot g \\
T_1 &= m_A \cdot a + m_A\cdot g \cdots (1′) \\
\end{align*}
\)
次に、式(2)より
\(
\begin{align*}
m_B \cdot (-2a) &= T_2 – m_B\cdot g \\
T_2 &= -2 m_B \cdot a + m_B\cdot g \cdots (2′) \\
\end{align*}
\)
式(1′), (2′)を問1の結果\(T_1 = 2T_2\)に代入し、
\(
\begin{align*}
m_A \cdot a + m_A\cdot g &= 2(-2 m_B \cdot a + m_B\cdot g) \\
m_A \cdot a + m_A\cdot g &= – 4 m_B \cdot a + 2 m_B\cdot g \\
m_A \cdot a + 4 m_B \cdot a &= – m_A\cdot g + 2 m_B\cdot g \\
(m_A + 4 m_B) a &= (- m_A + 2 m_B) g \\
a &= \frac{- m_A + 2 m_B}{m_A + 4 m_B} g \\
\end{align*}
\)
問3
答え:\(T_1 = \frac{6 m_A m_B}{m_A + 4 m_B} g\), \(T_2 = \frac{3 m_A m_B}{m_A + 4 m_B} g\)
問2の回答で得た式(2′)に問2の結果を代入して
\(
\begin{align*}
T_2 &= -2 m_B \cdot a + m_B\cdot g \\
&= -2 m_B \cdot \frac{- m_A + 2 m_B}{m_A + 4 m_B} g + m_B\cdot g \\
&= (-2 \cdot \frac{- m_A + 2 m_B}{m_A + 4 m_B} + 1)m_B\cdot g \\
&= (\frac{2 m_A – 4 m_B}{m_A + 4 m_B} + \frac{m_A + 4 m_B}{m_A + 4 m_B})m_B g \\
&= \frac{3 m_A m_B}{m_A + 4 m_B} g \\
\end{align*}
\)
同様に問1の回答で得た式(3′)に上記\(T_2\)の結果を代入して
\(
\begin{align*}
T_1 &= 2T_2 \\
T_1 &= 2\cdot \frac{3 m_A m_B}{m_A + 4 m_B} g \\
T_1 &= \frac{6 m_A m_B}{m_A + 4 m_B} g \\
\end{align*}
\)